Nous avons utiliser un distoX2 Leica et un smartphone avec l’appli topodroid
Liens avec des infos sur DistoX2
Après avoir calibré le distoX de ses 56 mesures, le % d’erreurs n’était pas satisfaisant du tout, mais vu que la session était improvisée vite fait et qu on voulait pas y passer la nuit on s’est dit qu’on allait produire malgré tout une série de données et voir le décalage avec la réalité, ce serait aussi pédagogique. Et on refera la calibration à la prochaine descente.
voila donc le chiffre honteux, erreur moyenne obtenu : 4.3 degrés. l’Erreur moyenne doit être inférieure à 0,5. Et Erreur Max inférieure à 1.
ICI un protocole pour calibrer sur ce lien
Continuons.
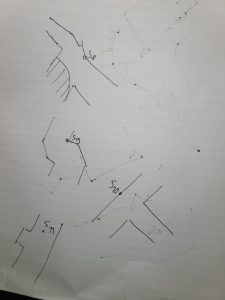
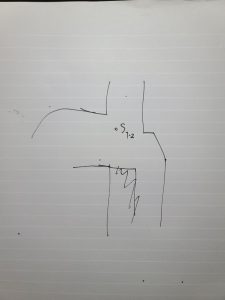
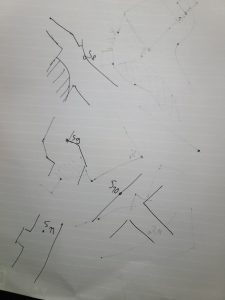
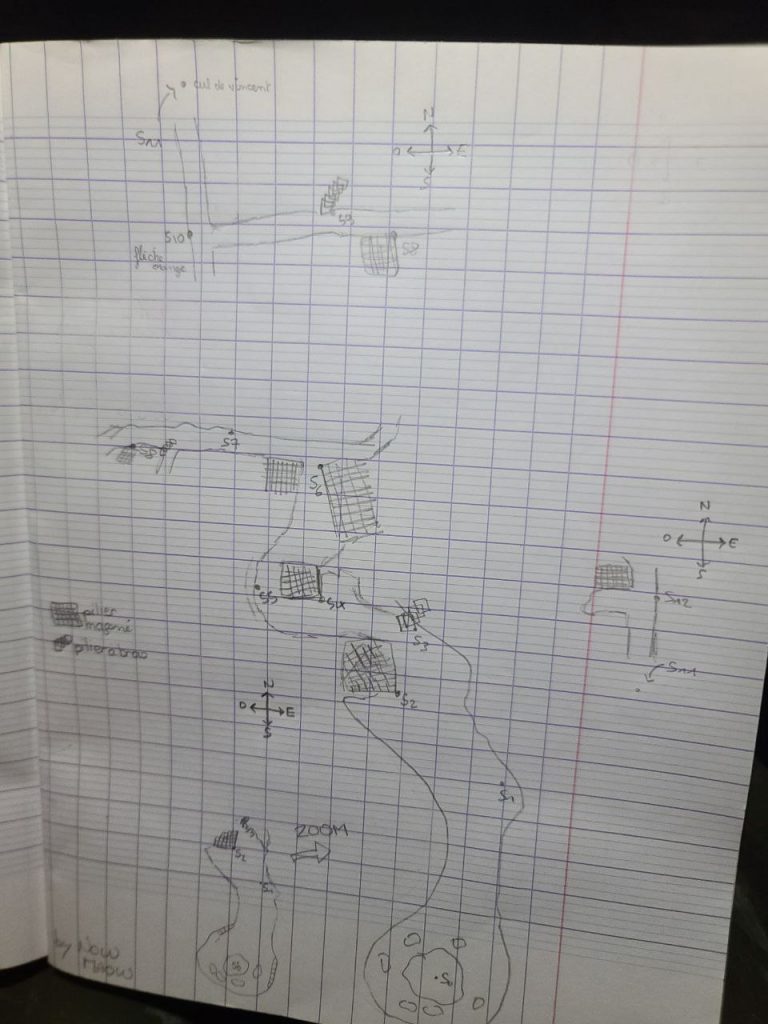
Un de nous prend les mesures, un autre devant s’arrête au niveau de la station suivante, et note dans son tableau les mesures, et les deux derniers dessinent le plan, et les stations.
Pour savoir comment prendre les mesures de cheminement :
On importe les données du disto vers topodroid à l’aide de la flèche bleu vers le bas.
–

–
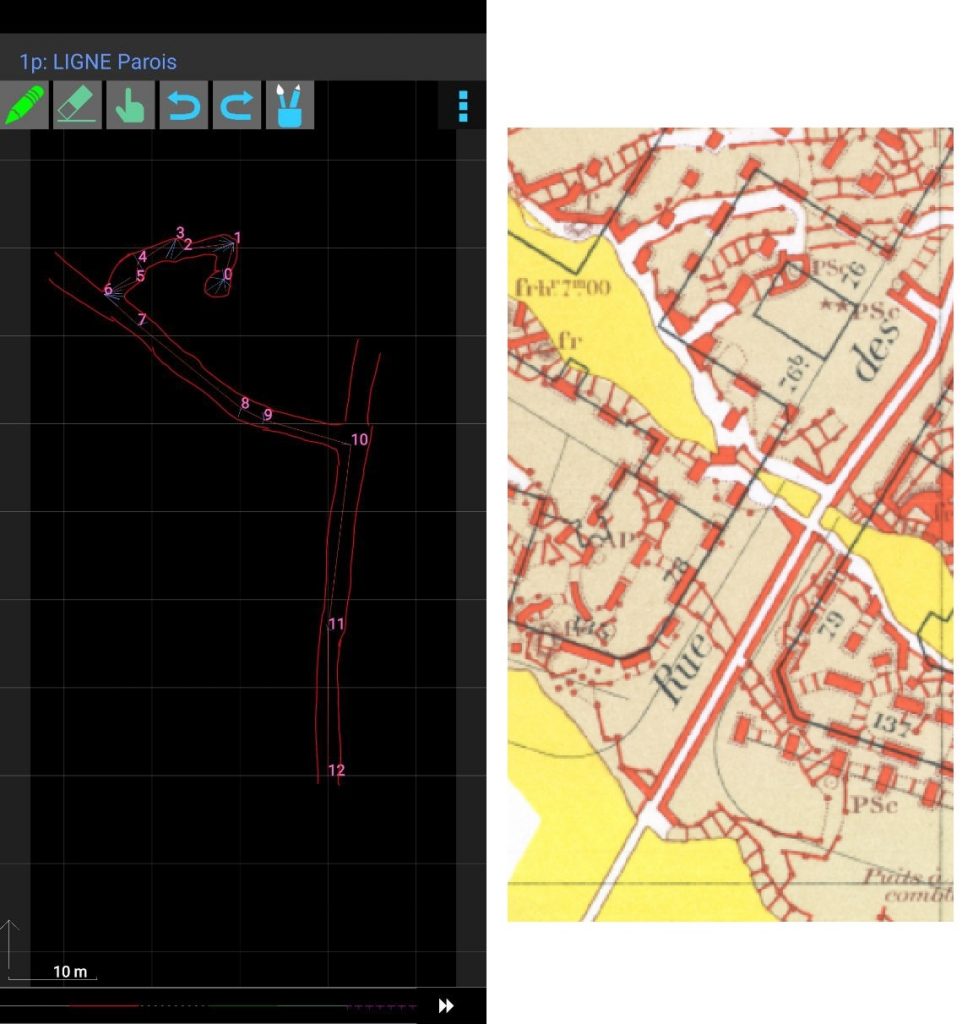
Et on peut visualiser le plan en squelette.. Ca ressemble à ce qu’on a fait, ca n’a pas l’air au antipode. C’est déjà ca. (c’est un peu déformé quand même faut pas délirer!)
Deuxième vérif rapide, le nombre de stations. Il correspond au prise de note. Le disto a pas sauté de station, c’est pas mal non plus.
–
–
Maintenant le retour à la maison.
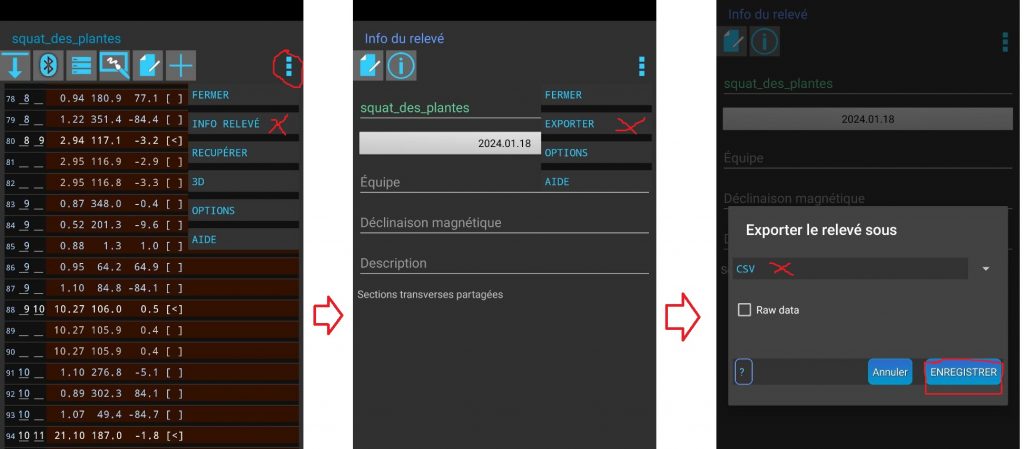
L’export depuis topoDroid :
–
–
–
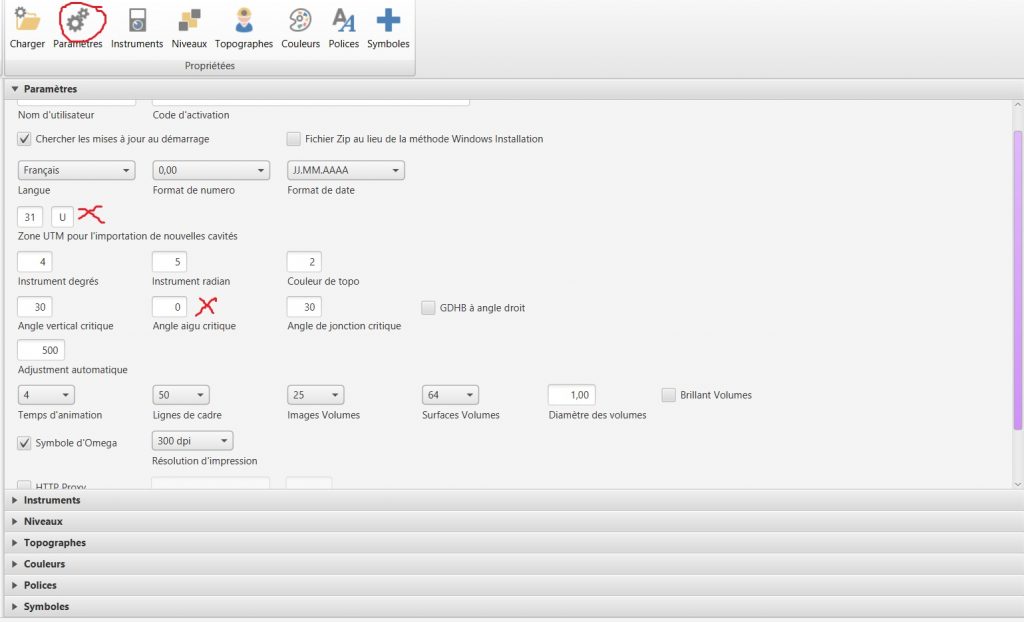
Sur l’ordi on va utiliser CaveRender.
Dans les paramètres, quelques réglages :
-> Le code d’activation
-> la zone UTM : pour Paris c’est 31U
-> l’angle aigu critique = 0 (zéro)
–
–
Dans Instruments :
> configurer celui utilisé. Ici distoX club, bien vérifié que c’est en degré (et pas en grade)
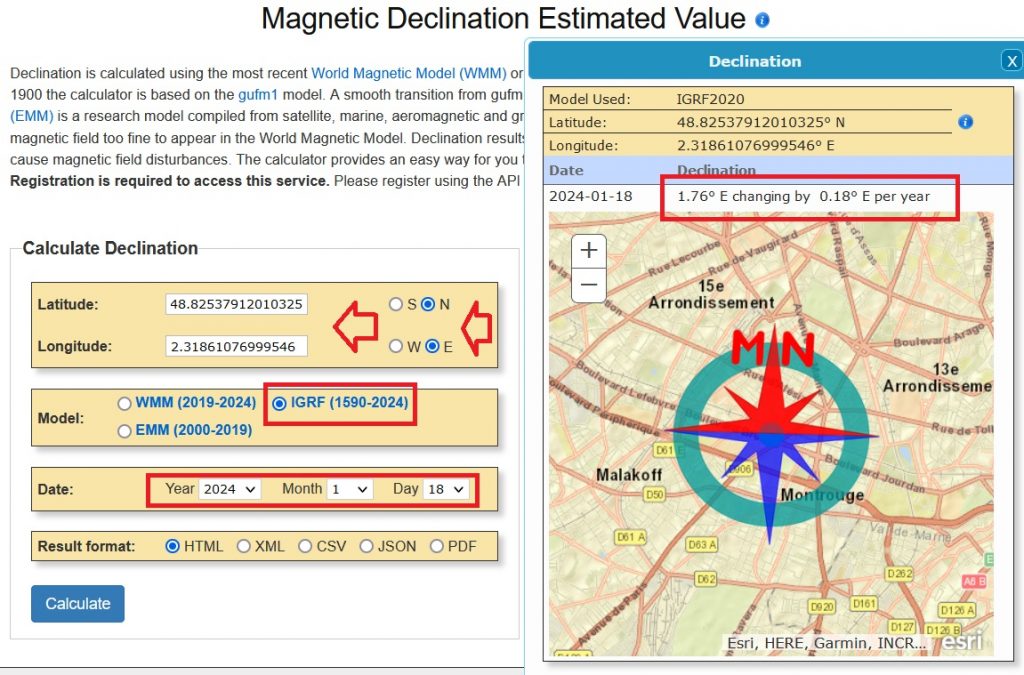
renseigner la déclinaison magnétique par rapport au point gps de la station 0
Sur ce site :
https://www.ngdc.noaa.gov/geomag/calculators/magcalc.shtml
On renseigne lattitude / longitude N S W E et / cocher IGRF / la date de la session topo
donc ici reporté 1.76° (déclinaison) et 0.18° (changement)
–
–
On obtient 1.76°
On renseigne ca dans “Instrument” / inclinaison est également en unité “degré”,
et on laisse l’orientation “horizon” ; qui signifit : 0° est l’horizontale, -90° vers le bas, + 90° vers le haut
–

–
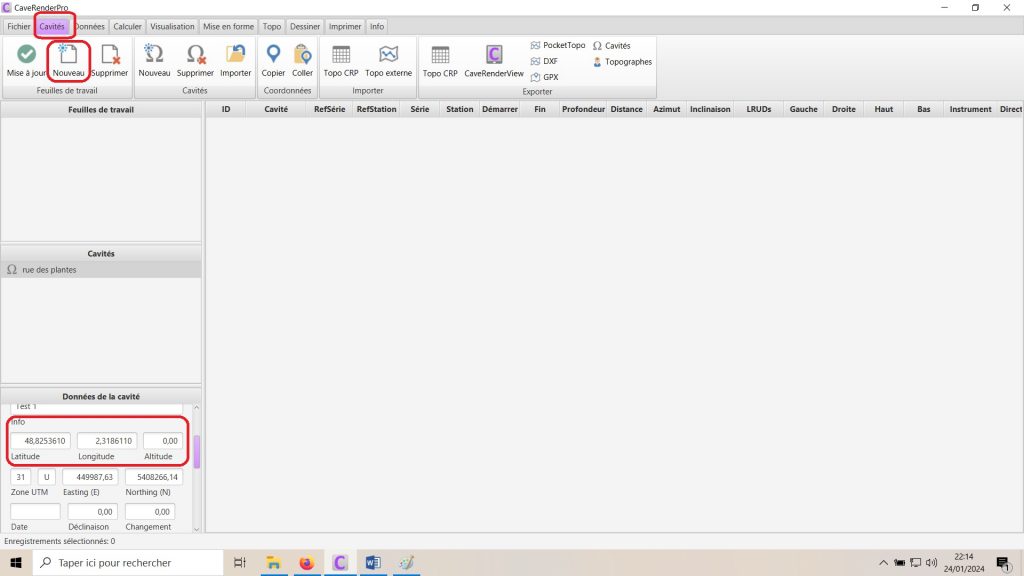
Créer une cavite :
cavité / Nouveau / Entrer le point GPS de la station 0 (correspondant à l’entrée même si c’est pas notre cas ici puisqu’on a pas topo depuis une entrée)
–
–
Ensuite importer le csv qu’on a récupérer sur le smartphone exporté depuis topodroid plus haut.
Cavité / Topo externe
–

–
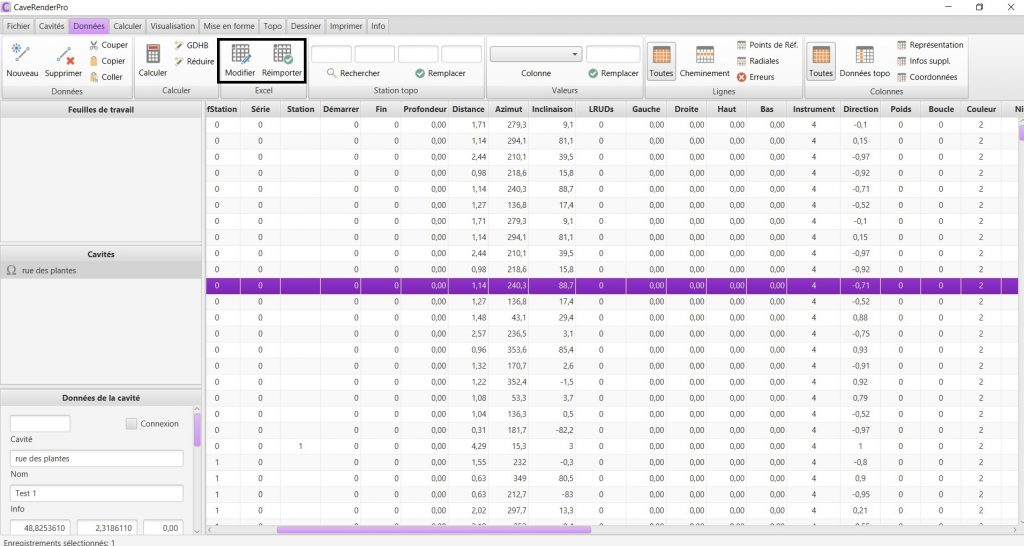
Un fichier apparait plus ou moins bien. Si des cases sont rouges, elles doivent être corrigées. En utilisant Modifier / réimporter. Excel ne doit pas être ouvert avant de cliquer là, surtout pas avec d’autres fichiers sans lien.
–
–
Ajouter une ligne de point de référence zéro avec le même azimut que le 0 > 1 et saisir les valeur gauche droite haut bas.
Dans données , afficher les coordonnées et remettre X Y Z à zéro sil les points GPS bug, et re-cliquer sur calculer.
Dans calculer selectionner Grille UTM et niveau de la mer.
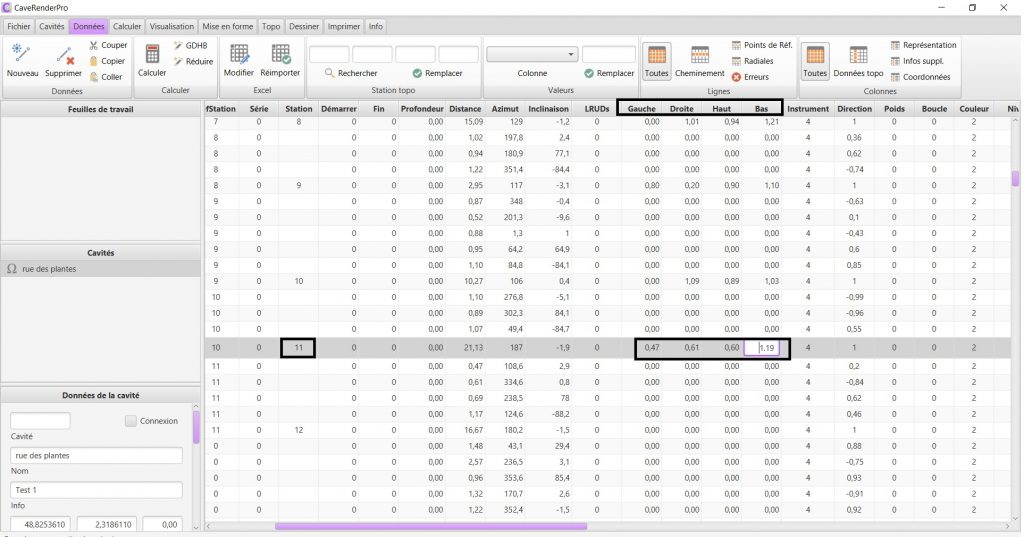
Renseigner manuellement les Gauche droite haut bas de chaque station
–
–
–
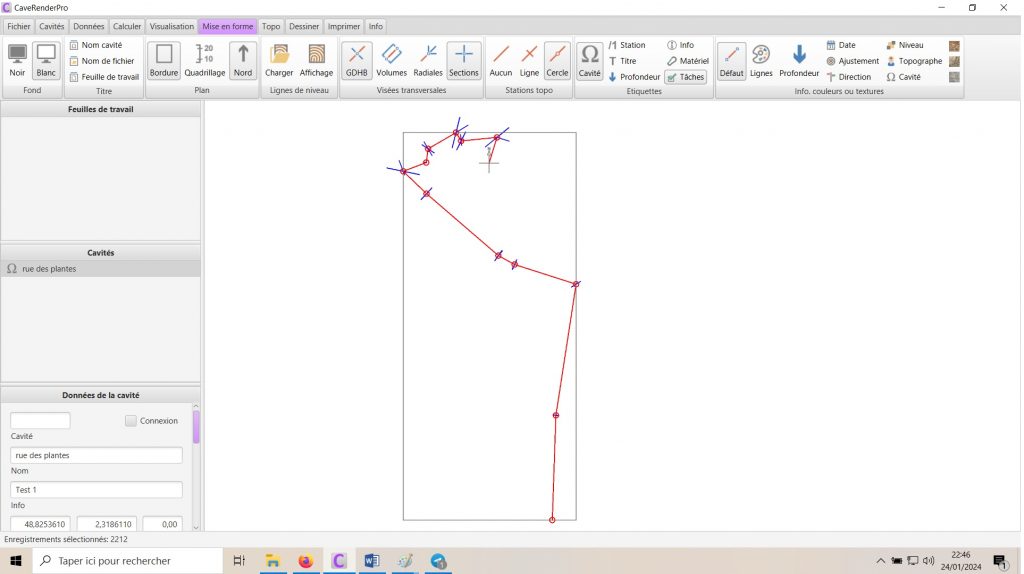
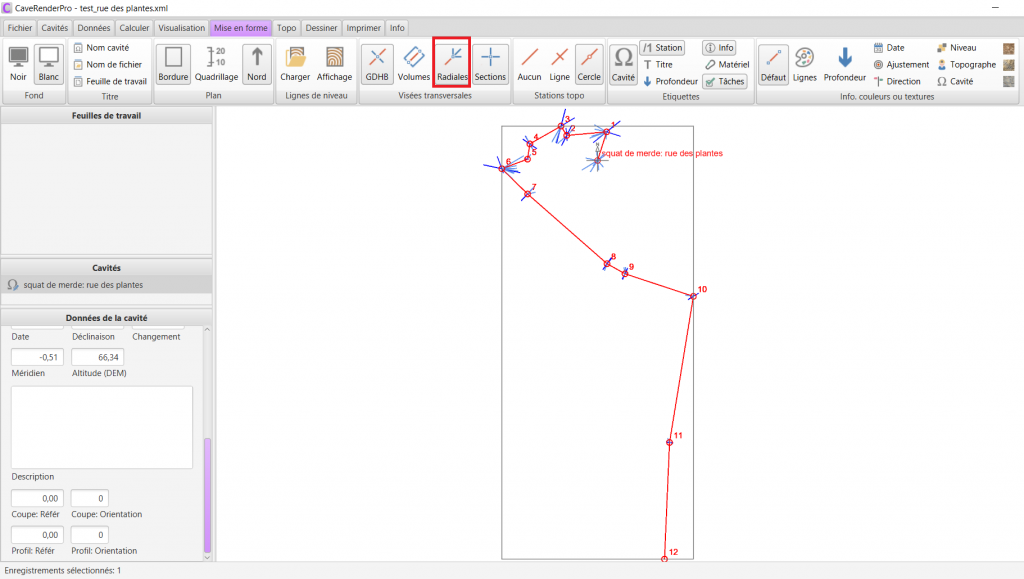
Dans Visualisation, ajouter les radiales pour voir les mesures d’habillage (ou splays)
–
–
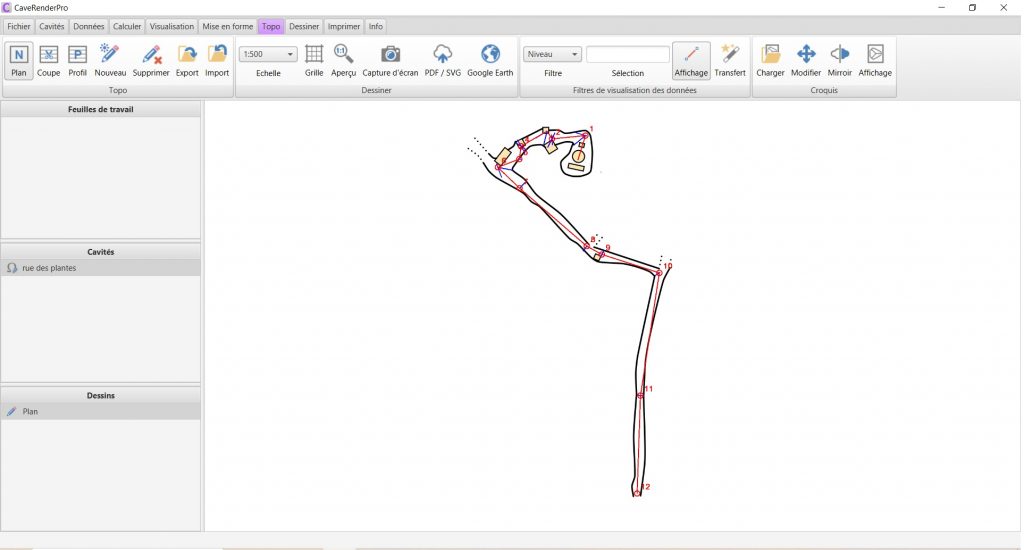
et on dessine.
–
–
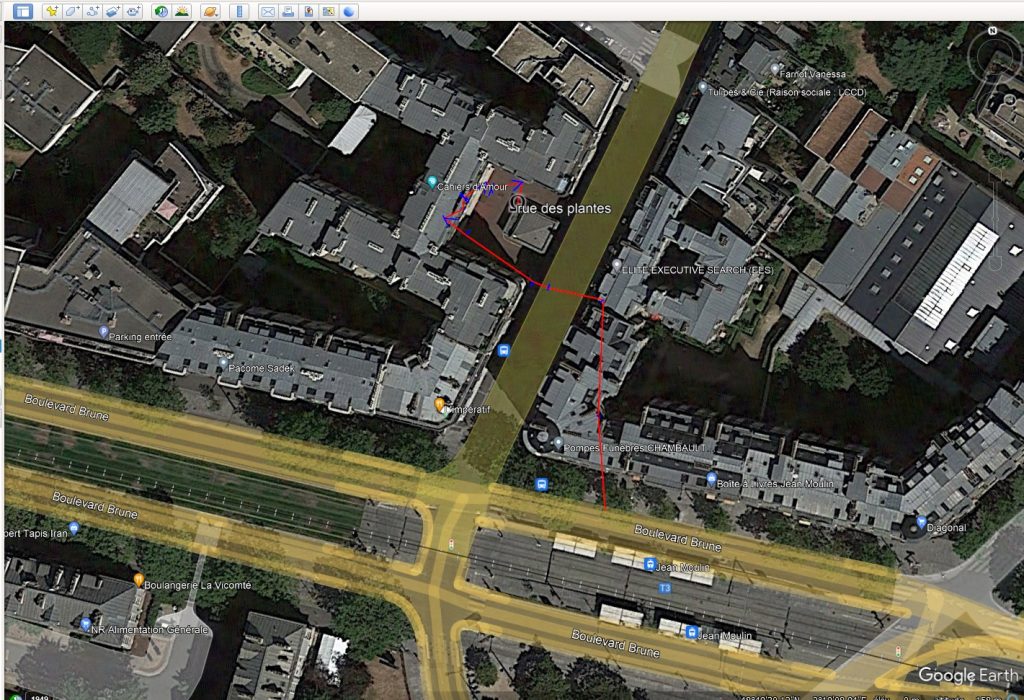
on peut visualiser la topo sur google earth, et la on voit bien que l’erreur de calibration de 4° n’était pas fameux, ca ne colle pas, la galerie devrait longer la rue des plante sur les trois dernieres stations en ligne droite.
–
–
Game Over
–